.png)
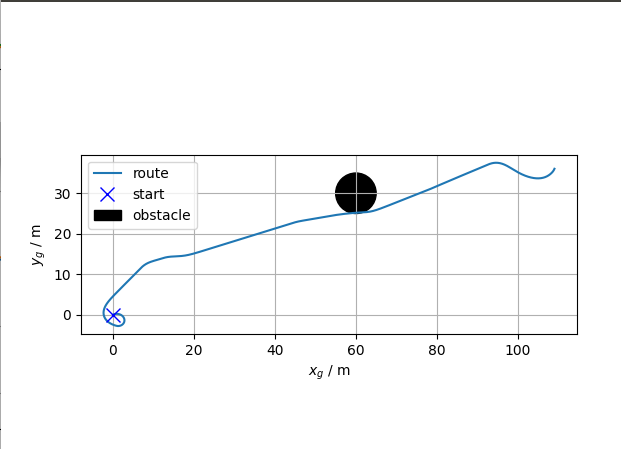
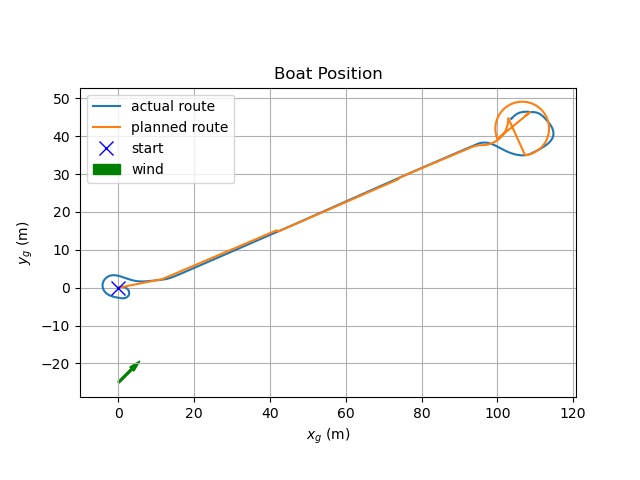
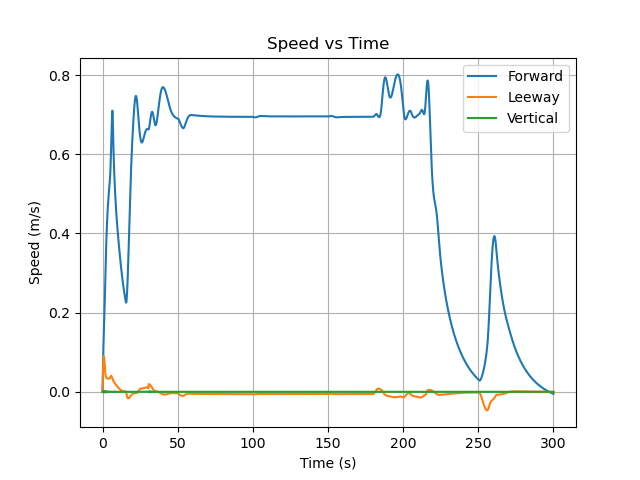
Fig. 3, 4: Single obstacle avoidance to reach(100,40) with wind in the direction of sailing and no waves [LEFT] Channel navigation to reach(100, 40) with wind in the direction of sailing and 0.5 m waves [RIGHT]
Our code is based on that of stda-sailboat-simulator. This simulator uses RK45 to solve an ODE of the sailboat dynamics over time.
Fig. 3, 4: Single obstacle avoidance to reach(100,40) with wind in the direction of sailing and no waves [LEFT] Channel navigation to reach(100, 40) with wind in the direction of sailing and 0.5 m waves [RIGHT]
(a) Names and short bios of each member of your group


